pada kesempatan kali ini saya akan post tentang materi kontroler pada mata kuliah sistem kontrol yang menurut saya cukup rumit :D.
langsung saja masuk ke dalam isi......
Kontroler disebut juga kompensator, pengendali atau filter. Kontroler adalah suatu sistem dinamis yang ditambahkan untuk mendapatkan karakteristik sistem yang diinginkan.
Fungsi kontroler:
1. Membandingkan nilai masukan dan keluaran sistem
secara keseluruhan.
2. Menentukan penyimpangan.
3. Menghasilkan sinyal kontrol untuk mengurangi penyimpangan
menjadi nilai nol/ nilai yang kecil.
Tujuan sistem kontrol secara khusus:
1. Meminimumkan error steady state.
2. Meminimumkan settling time.
3. Meminimumkan maximum overshoot.
Macam-macam kontroler analog industri adalah:
1.Kontroler dua posisi atau "on-off"
2.Kontroler proporsional (P)
3.Kontroler integral (I)
4.Kontroler proporsional + integral (PI)
5.Kontroler proporsional + turunan (PD)
6.Kontroler proporsional + integral + deferensial (PID)
- Kontroler Dua Posisi (on-off)

Diagram blok kontroler on-off
Berdasarkan gambar diatas:
u(t) = U1 untuk e(t) > 0
= U2 untuk e(t) < 0
dengan U1 dan U2 konstan.
Nilai minimum U2 biasanya nol atau –U1.
Kontroler dua posisi umumnya merupakan perangkat listrik dan
sebuah katub yang dioperasikan dengan selenoida.
- Kontroler Proporsional (P)

Diagram blok kontroler Proporsional
Berdasarkan gambar diatas:
u(t) = Kp.e(t)
U(s)/E(s) = Kp = fungsi alih
dengan Kp merupakan suku penguatan prporsional.
- Kontroler Integral (I)

Diagram blok kontroller Integral

dengan Ki konstanta yang dapat diubah.
- Kontroler Proporsional Integral (PI)

Diagram blok kontroler proporsional integral

dengan Kp penguatan proporsional dan Ti waktu integral
- Kontroler Proporsional Diferensial (PD)

Diagram blok kontroler proporsional diferensial

dengan Kp penguatan proporsional dan Td konstanta waktu turunan
Kontroler Proporsional Integral Diferensial (PID)

Diagram blok kontroler proporsional integral diferensial
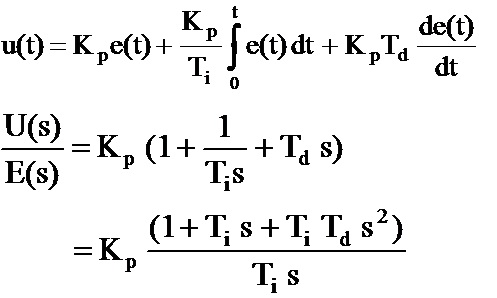
dengan Kp penguatan proporsional Ti waktu integral dan Td waktu turunan.
Kombinasi ini mempunyai keuntungan dibandingkan masing-masing kontroler, biasanya dengan kontroler ini didapatkan overshoot yang rendah , cepat mencapai steady state (keadaan mantap) dan error steady state (kesalahan keadaan mantap) yang kecil bahan 0.
sekian dari saya...
semoga bermanfaast ^^.
semoga bermanfaast ^^.





Tidak ada komentar:
Posting Komentar